近日,我院李长江老师在自动控制领域顶级期刊IEEE Transaction on Cybernetics(影响因子11.8)上发表了常文“Relative States-Based Consensus for Sampled-Data Second-Order Multiagent Systems With Time-Varying Topology and Delays”。南方科技大学刘国平院士为论文共同作者。
多智能体系统一致性控制是自动控制领域的重要研究方向,具有多方面的挑战性。针对基于相对测量的一致性控制的拓扑切换与时变时滞问题,作者提出了一种基于多项式参数化的一致性控制方法,从理论上给出了系统状态一致的条件,并通过实验验证方法的有效性。主要创新点包括:提了一种新的参数化多项式的一致性控制器设计方法;考虑的网络为具有随机切换的一般非对称网络并考虑了网络时滞;提出了一种基于块半范数的一致性分析方法,解决了一大类多智能体系统的状态同步问题。
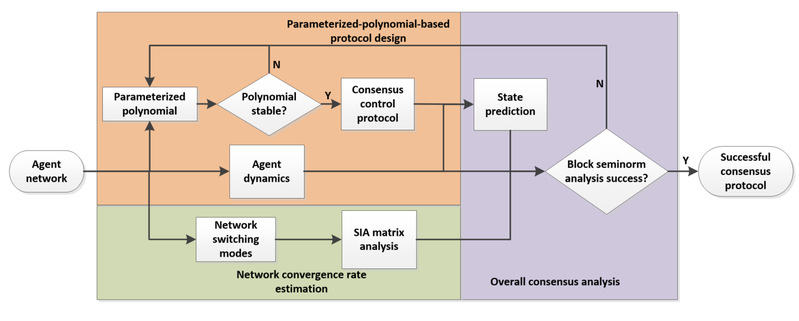
图1 面向相对测量的动态网络一致性控制算法
据悉,李长江老师在分别在自动领域顶级期刊《IEEE Transactions on Systems, Man and Cybernetics: Systems》(2023, https://doi.org/10.1109/TSMC.2023.3342010, 影响因子8.7)和《IEEE Transaction on Cybernetics》(2021,https://doi.org/10.1109/TCYB.2021.3079717)上发表了两篇系列论文。研究工作得到了国家自然科学基金和江苏省自然科学基金的支持。
论文链接: https://doi.org/10.1109/TCYB.2022.3232507
